Steering Gear System has been the part of ships ever since its existence. One of the first steering systems was the pair of oars used to propel and steer the ship. With the advance in technology, the system evolved from oars blade to rudder and shanks to rudder stock & tiller facilitating turning moment.
There is a high chance that you might witness how rudder helps to steer the ship/boat. Indeed rudder is the essential part of steering assembly, but the rudder action is facilitated through another complex system onboard called “Steering Gear System”. A steering gear system provides movement to the rudder in response to the signal from the bridge.
Before getting into the construction and working of the steering gear system; We must look into the regulations regarding steering gear systems onboard ships.
Regulation for Steering Gear System:
- Each ship must be equipped with the main and auxiliary steering systems.
- The arrangement for both system should be such; that failure of one should not adversely affect the other.
- A relief valve must be installed on any part of the hydraulic steering system.
- Rudder stock and steering gear should be sufficiently strong and capable of steering at the maximum speed.
- The rudder stock and steering gear must be capable of moving the rudder from 35o port to 35o starboard under the deepest draft and maximum speed. They must also move the rudder from 35o on one side to 30o on another in not more than 28 sec.
- The rudder stock and steering gear must be capable of steering at maximum astern speed.
- The auxiliary steering system should have sufficient strength to efficiently steer the ship at normal sea speed under emergency condition.
- The auxiliary steering system must be suitable to place the rudder from one side to another (15o to 15o ) in not more than 60 sec.
- For each Oil, Gas, and chemical tanker of more than 10,000 gross tonnages; the main steering gear system should have two or more similar power units.
Types of Steering System
- Electric: Example is Ward-Leonard system (We will not discuss; If you are interested you can check this post link)
- Hydraulic: Example is two and four ram system. (We will discuss in detail)

Parts of Steering Gear system
Steering System can be classified into three major parts, which are:
- Control Unit: It conveys the desired rudder angle from bridge to steering flat. Then it activates the power unit and transmission system in the steering room. Ex: Hydraulic Telemoter system.
- Power Unit: After receiving the signal for a designed rudder angle from the control unit; It generates force with immediate effect to move the rudder to a certain angle.
- Transmission to the rudder stock: It is the means by which the movement of the rudder is accomplished.
Hydraulic Telemotor System
The modern telemotor system works on the principle of master and slave. It constitutes of two main unit’s “Transmitter” and “Receiver”. The transmitter is situated on the bridge and converts the mechanical movement of the steering wheel at the helm to the hydraulic force. It is then traduced back by the receiver at the steering gear unit.
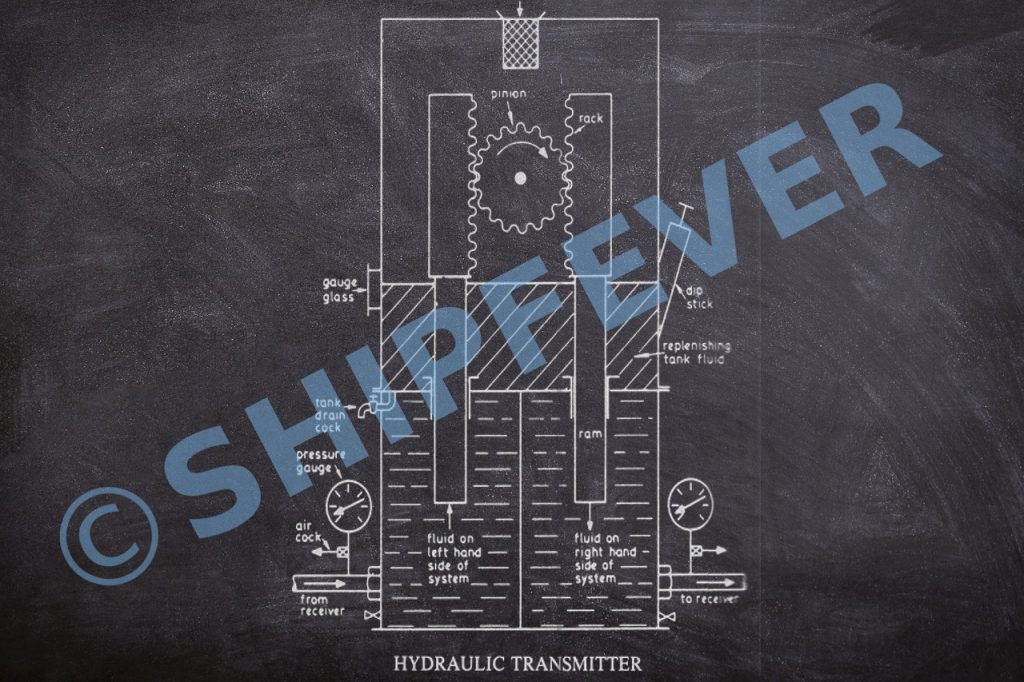
Hydraulic Transmitter
When the steering wheel at the helm is rotated (say: Starboard), then the rotating piston moves along the right causing the right-hand ram to move down.
It generates pressure on the hydraulic oil pushing it into the receiver unit through right side pipes to the receiver. The movement of the pinion to the right also raises the left-hand ram, allowing the oil to return from the receiver unit.
The fluid being virtually in-compressible, any downward movement of the Right Ram produces an identical movement at the receiver unit.
This leads to the movement of cylinder at receiver end; displacing equal amount of hydraulic oil back to the telemotor transmitter. This is taken up by the space created by the upward movement of the left-hand ram.
The housing is generally made up of gun metal with copper pipes and brass rams. In the system, a device (indicated as a bypass valve) is required to allow variations in the oil volume due to temperature changes.
The bypass valve also serves the purpose of filling / Top-up the system and allow equilibrium between both sides of the system.
Hydraulic Receiver
As in the above condition where the steering wheel at helm (bridge) is moved to starboard. Which pushes the ram on the right to down, generating hydraulic pressure on the telemotor receiver. The telemotor receiver consists of a receiver cylinder in the steering flat with a moving cylinder attached to the hunting gear.
The pressure generated by the telemotor transmitter generate force on the cylinder of telemotor receiver to move. Which in turn changes the position of hunting gear; changing the delivery of the pump (Control Unit).
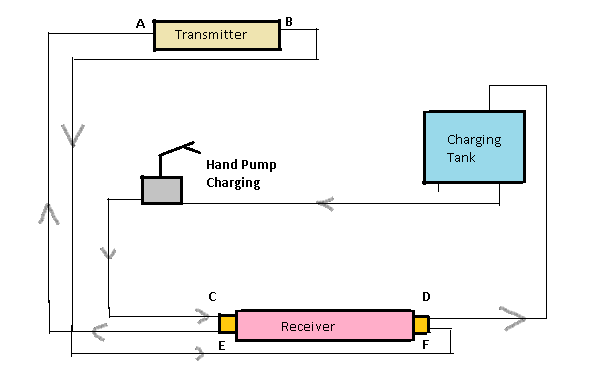
Telemotor charging system
Special arrangements are made for charging the hydraulic telemotor system. This is done to make sure there is constant head of oil in the tank to avoid air in the system.
For charging, pump the oil until a clear discharge occur at C. Then we have to open valve C,D,E & F. Then we open the air cocks and continue pumping till we get a discharge at D.
Typically a spring-loaded valve is provided on the return line to prevent any back-flow in the charging system. The steering wheel is positioned centrally, then bypass and charging v / v are opened.
Pump until all the air in the telemotor system is removed. Now close the air cocks. Close charging and bypass v/v’s and open charging shut off valves. The gear is now ready for leak testing.
Power Unit
A pump,motor, or engine used as a prime mover to change the position of rudder. Generally variables displacement pumps are used to supply the oil / any other working fluid to the steering system connected to rudder.
Theses pumps are used in steering system as they are well suited for applications that require continues change in fluid flow.
It works on the principle of changing the pump stroke to change the output with parts such as floating ring and swash plate. The flow direction depends upon the location of floating ring; either left or right of the center.
While the discharge rate depends on the amount of displacement for the floating ring from its mid position.
These pumps can be easily classified into two major types:
- Hele-Shaw pumps (Radical Piston)
- Axial piston pumps. (VSG Pumps)
Hele-Shaw Pumps
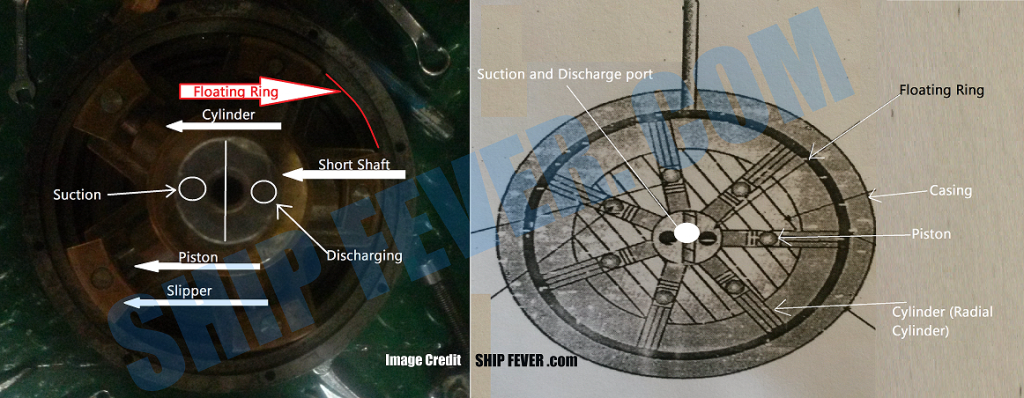
Hele-shaw pump comes under variable displacement pump
Although in many books and articles the working of the Hele shaw pump is described in a Complex manner, the reality is, it works is simple.
This pump is connected to a motor for rotation of the shaft at a constant speed to which Cylinders are connected.
The Floating ring is actuated/Moved by mechanical linkage (Such as Hunting gear) and this movement cause eccentricity of the concentric Floating ring and piston(Cylinders). So, now the Suction and discharge occur as the pump rotate in the eccentric state.
The eccentricity of floating ring determines the stroke of the piston, floating ring accommodates slippers.
As long as the concentric state is maintained no suction or discharge occurs, as eccentricity occurs the suction and discharge starts. The direction of flow depends on the location of the floating ring.
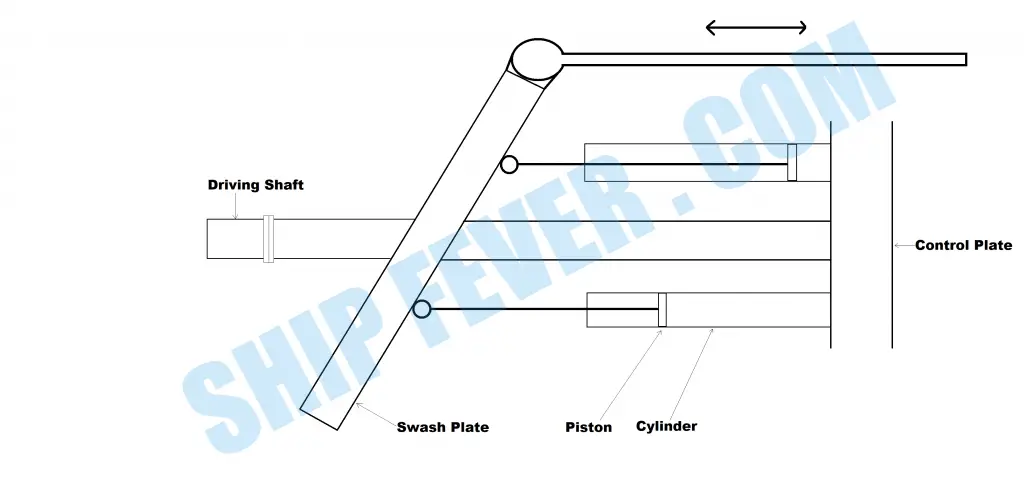
VSG Pump
VSG pump are the advanced type of variable displacement pump with the axial piston arrangement which works on the principle that “A reciprocating piston draws in liquid during retraction and discharge while it extends”.
It consists of the following main parts Casing, Cylinder block, Piston, Drive shaft, Swash plate, Adjusting valve, and Inlet & Outlet ports.
Here the reciprocating motion of the axial piston is obtained by using a swash plate. A swash plate is a device used in variable displacement pumps to change the motion of rotating shaft to the reciprocating motion of the axial piston.
Due to its implications, VSG pumps are commonly known as swash plate pump. These pumps are commonly used as a steering pump on large ships.
Due to swash plate arrangement in the VSG pumps, piston rotates around the shaft along with the piston barrel assembly.
There is a contact between the swash plate surface and the piston shoe for the synchronous movement of the axial piston.
During the one half of the rotation, piston moves out leading to increase in the volume inside the cylinder; while in the other half leading to decrease in the volume. This continuous phenomenon leads to the suction and discharge of the pump.
Types of Steering Gear
Depending upon the torque needs; there can be one of two types of steering gear on board ship:-
- Ram Type ( 2 Ram vs 4 Ram )
- Rotary vane type.
Ram Type
One of the most common steering gear system used on ship; Ram type steering gears contain hydraulic cylinders attached to discs connected to the hydraulic pumps.
This can either have a cross-head arrangement with forked / Rounded arm’s tiller to convert ram moments to angular tiller moment; or incorporates a Rapson slide actuator where the cross-head is free to slide along the circular arm’s of the tiller.
Two Ram Hydraulic Steering system
The Two rams hydraulic steering mechanism consists of two cylinders, a pump and a motor as it is shown in the previous figure. The pump has a unidirectional variable displacement, constant speed flow.
When the oil is pumped into the hydraulic cylinder LHS (port) and removed from the hydraulic cylinder RHS (Stbd), the cylinder move from left to right. The tiller moves to starboard and the helm on the port.
The instant pumping is stopped, the movement of the rudder arm stops and the rudder is fixed hydraulically to this new position because the oil does not have any way to leave out of the cylinder.
Lifting the PSL pump causes the pump to go on stroke and cause flow to the LHS cylinder and pressurized the RHS cylinder. When PSL is removed, the reverse process occurs: LHS is DE-pressurized and RHS is under pressure.
When PSL is currently in the central position represented by “0” in FIG. The pump is not touched and the oil is trapped in LHS and RHS piston cylinders.
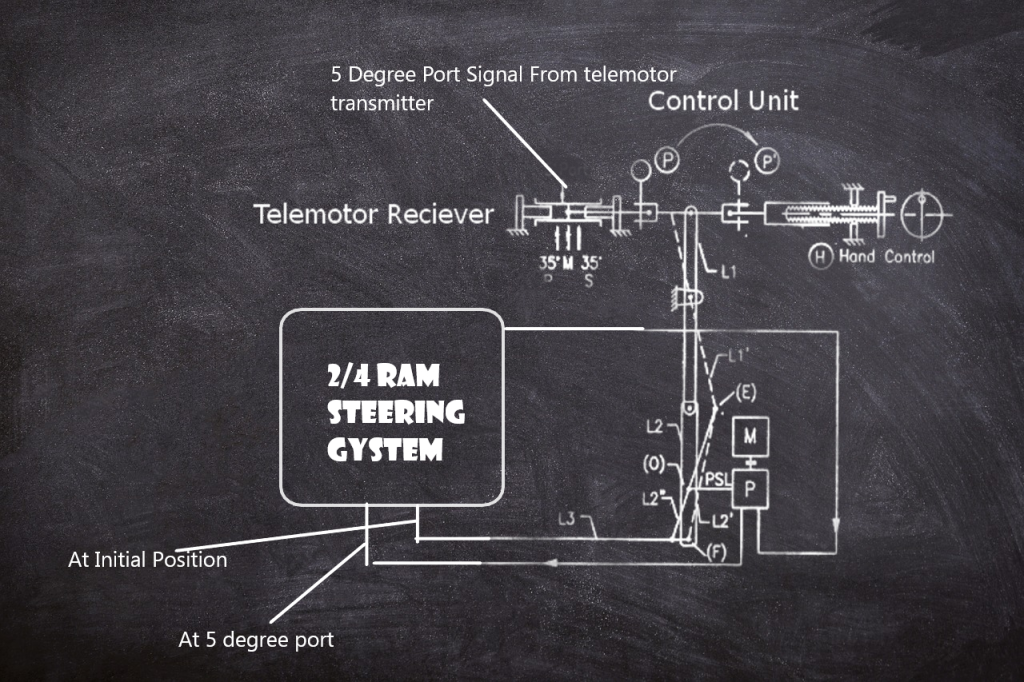
Working
To explain how these steering movements happen continuously & automatically, consider a desired movement of the rudder by 5 degrees Port.
Upon receipt of a signal from the wheelhouse, the cylinder of the telemotor receiver moves 5-degree port to the left on the steering plane.
The L1 lever with a pivot in the middle takes the position of L1 ‘. L2 lever moves to point F and occupies position L2 ‘. As a result, the PSL is pushed towards the pump as it rolls towards the L2 lever and the pump starts pumping the LHS cylinder, pulling it simultaneously from the RHS cylinder.
Rams will slide from left to right, and rudder shall move towards the port. As the rudder moves towards port the lever L3 lever moves to the left. The rudder continues to move in the direction of the port until at 5 degrees Port lever moves back from position L2 ‘to the old position L2.
Emergency Operation in case of telemotor failure
In case the telemotor system get failed; there must be a suitable arrangement in the system to steer manually.
To perform the manual operation, first we have to remove the link pin on the receiver side of the control unit and insert it into the hand gear unit of the control system. Now by using trick wheel, we can operate the rudder movement manually.
Arrangements are made in the steering gear system; such that in the event of using receiver linkage the hand gear link remains inactive and vice versa.
Only one pin is provided to be used to ensure only one out of either of the two remains active at a given time.
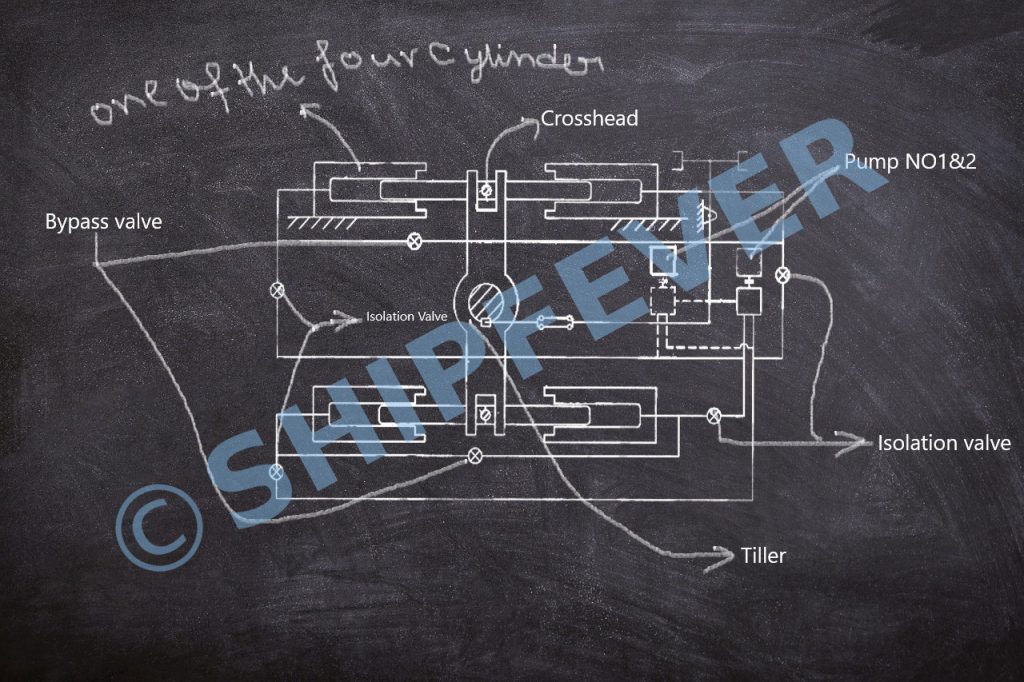
Four Ram Hydraulic Steering System
Four ram steering gear system works on the same principle as of two ram steering system. The only difference is that; it has four ram instead of two. The torque developed is also two times that of two ram steering system with better safeties and emergency operation.
In emergencies such as hydraulic leakage, it can still be used to steer with minor adjustments in the system; Such as isolating one set of ram through bypass and isolation valves. this can be achieved as follows under the emergency condition:
1. During normal operation with all 4 rams in operation: isolating valves 1, 2, 3 & 4 open, bypass valve 5 & 6 shut
2. Isolating valve 1 & 2 shut, bypass valve 5 open, Isolating valve 3 & 4 open, bypass valve 6 shut; Rams 1 & 2 isolated (due to leakage etc.) Now only ram 3 and 4 are operational.
3. Isolating valve 3 & 4 shut, bypass valve 6 open; Isolating valve 1 & 2 open, bypass valve 5 shut; Rams 3 & 4 isolated (due to leakage etc.) Now only ram 1 and 2 are operational.
Safematic design of steering system
As per Solas requirement, All tankers of more than 10,000 GRT and all other 70,000 GRT vessels should have a safematic steering system.
Arrangements should be there to isolate the fault and continue using the steering system under emergency. To avoid total failure of the steering system, automatic isolation and bypass valves are introduced to the system.
Under normal conditions, one pump satisfies the need for all four rams. In case of leakage, the level switch gets activated starting the standby pump and raise the alarm.
But if the further leak persists in the system, it initiates the bypass and isolation valve. Now steering gear run on 50% of its torque isolating the faulty set of rams.
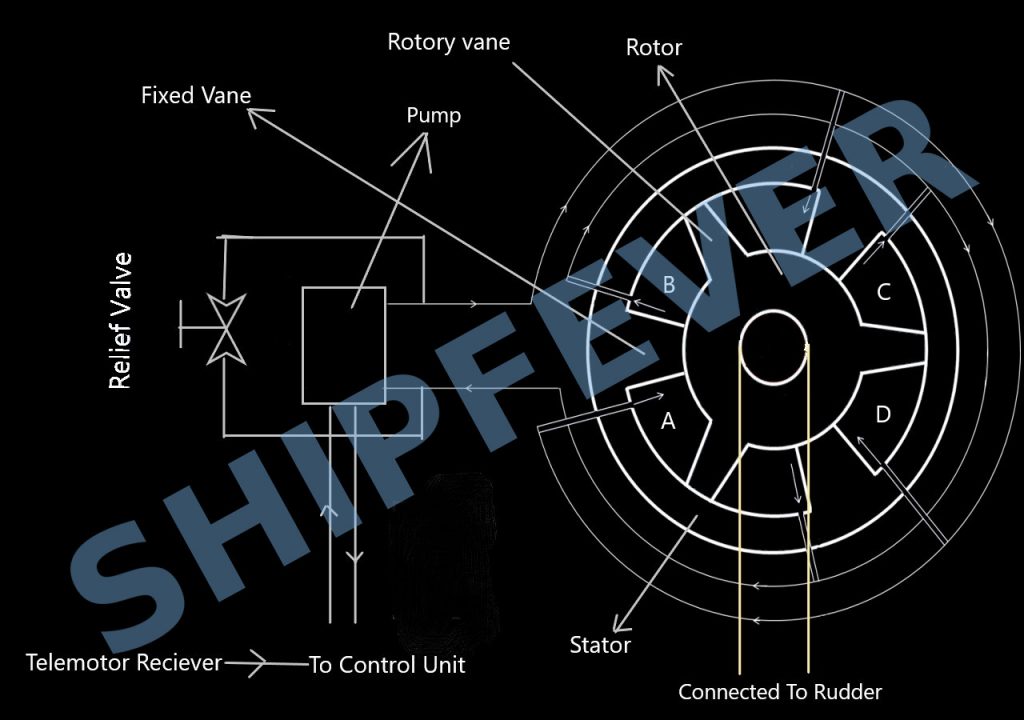
Rotary Vane Design:
Rotary vane steering gear system works on a similar principle as of the two and four ram steering systems. The only difference is that instead of rams, here we have different chambers build by housing and vanes.
When chamber A and D are pressurized; A&D is connected to the discharge side of the pump with B&C connected to the suction side. This turns the rudder to the anticlockwise direction.
Rotary vane arrangement is preferred over Two or four Ram system, where there is less space, low budget and wants same torque output at much lower hydraulic pressure.
Note:The above content is correct as far as i know, But You are welcome to comment down below if i made some mistakes or if it was useful to you.
Also Read:
- Fresh Water Hydrophore System in Ship
- Engine Cooling System – Types And Their Working
- What Is Bilge And Ballast System & How It Works In Ship
- Lubricating Oil System On Ship | Explained
Working of hydraulic receiver in steering gear
The hydraulic telemotor receiver consist of a fixed ram, central web and moving cylinder held against the spring force. Now when the steering is rotated in any direction ( say clock wise / starboard ), the telemotor transmitter put force on the fluids in right hand side system. This pressure is transmitted to the telemotor receiver ( liquids fluid are in-compressible ) acting force on the central web. Now this force push the moving cylinder in opposite direction i.e left hand site based on the received force. This cause pressure on fluids on the left hand side of the moving cylinder forcing them to return to the left side of telemotor transmitter. Furthermore this cause the spring to compress in one direction. Now when the steering is taken back to mid position this spring tension cause the moving cylinder to return to mid position i.e its initial position. – I hope than answers your doubts.
What is the purpose of trickwheel in a steering gear system? Where is this used?
Trickwhell acts as a fail safe mechanism in normal steering gear system in ships / large boats. Ideally the steering of the ships is controlled either from bridge or engine control room using hydraulic systems. But in event if both of these controls fails the ship can still be steered manually from steering compartment in the engine room using the Trickwhell or hand lever operating hydraulic pumps.
Can you elaborate further the purpose of Hunting Gear
mechanism in a Steering Gear System please sir?
To simplify what I have already explained the hunting gear in a steering system acts as a feed back mechanism which transmits the rudder position to the pump control lever via floating lever. A change in position of hunting gear will bring change in delivery of the pump in control unit.
What is the purpose of a floating arm in the circuit?
The floating arm or floating lever is an integral part of hunting mechanism of the steering gear system on ships. The hunting mechanism is basically a feed back system through which the steering pump operation is controlled based on actual rudder position. The floating lever on one end is connected to the hunting lever of rudder stock and on other side to the pump control lever and telemotor receiver. When in idle condition the variable delivery steering pump does not discharge oil. Now when the telemotor receiver moves to port and starboard this change the position of floating lever operating pump control lever to start pumping cylinder oil. This turns the steering gear and rudder turned to desired direction. The feedback is sent back to the hunting lever then which again reset the floating lever to idle position.
can you explain autopilot system,will there be hunting gear and floating lever during autopiloting?i
While i am not going to explain auto pilot system in details; let me explain in short. A autopilot system use the same steering gear system as the one used under manual command. The only difference is that the telemotor receiver get signal not from human through telemotor transmitter but via a control unit installed on bridge. This control unit analyze the compass direction and current rudder angle to the set course and then make sufficient changes operating steering gear to maintain set course direction.
can we use safematic system during normal running?does safematic also have floating lever and hunting gear mechanism?
Yes, we can test the working of safematic emergency system in steering gear system even under normal condition. In fact it is part of u.s coast guard inspection many a time to check the working of safematic system. A safematic system in a steering gear system allows for automatic isolation of defective or leaking hydraulic part of system changing over to the remaining hydraulic pump, hydraulic cylinder and mechanical system for the steering assembly.It is not an separate steering unit but just an independent control unit to isolate and operate bypass valves of four ram steering gear system or rotary vane to automatically isolate the leaking part and switchover to maintain ship’s maneuverability.
does safematic system has floating lever and hunting gear mechanism..in nfu i think we dont have floating and hunting mechanism..so as soon as we release the nfu lever the rudder comes back to its initial position…i want to know whether se have floating and hunting gear mechanism in autopilot and safematic system
Safematic emergency system is an independent system attached to the steering gear who’s purpose is just to automatically operate the isolation valve to switchover the the hydraulic pumps, hydraulic cylinder and mechanical parts. So safematic gear don’t have any hunting gear or floating gear neither have any connection or feedback system connected to them. Hunting gear and floating lever is an integral part of the ship’s steering system and and not safematic system. The safematic steering gear system is not a separate assembly but rather just an independent unit of steering gear system.